Robots to rebuild themselves and evolve without human intervention
In this framework of a ‘model-free artificial evolution’ researchers have designed what they call a ‘mother robot’ that can manipulate and create cubic modules improving them as they evolve.
'Today’s machines are restricted to their morphological configurations'
“The adaptation of physical shapes and structures is a fundamental mechanism which allows biological systems to survive in a large variety of environments,” said co-author Luzius Brodbeck.
“Through evolutionary adaptation some animals changed their morphologies to live on land instead of under water, and phenotypic plasticity allows plants to adapt their structures for the survival on an ontogenetic time-scale.
“Today’s machines, in contrast, are highly restricted to their initial morphological configurations, and it is still a question whether machines can achieve a similar level of adaptability by adjusting their morphologies.”
The authors of the report are engineers Brodbeck, and Fumiya Iida from the Department of Engineering, Cambridge University in the UK and Simon Hauser of Biorobotics Laboratory, EPFL—Ecole Polytechnique Fédérale de Lausanne, Switzerland.
The project is in association with the Institute of Robotics and Intelligent Systems, Department of Mechanical and Process Engineering, Zürich, Switzerland.
The aim is to develop robots that can improve by themselves and adapt to their surroundings and new situations.
A ‘mother robot’ autonomously designs and assembles locomotion agents
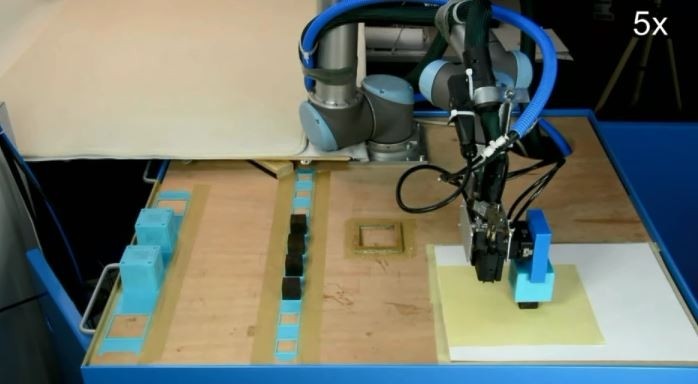
As part of the experiment, a ‘mother robot’ autonomously designs and assembles locomotion agents. The locomotion agents are automatically placed in a testing environment and their locomotion behavior is analyzed in the real world. This feedback is used for the design of the next iteration.
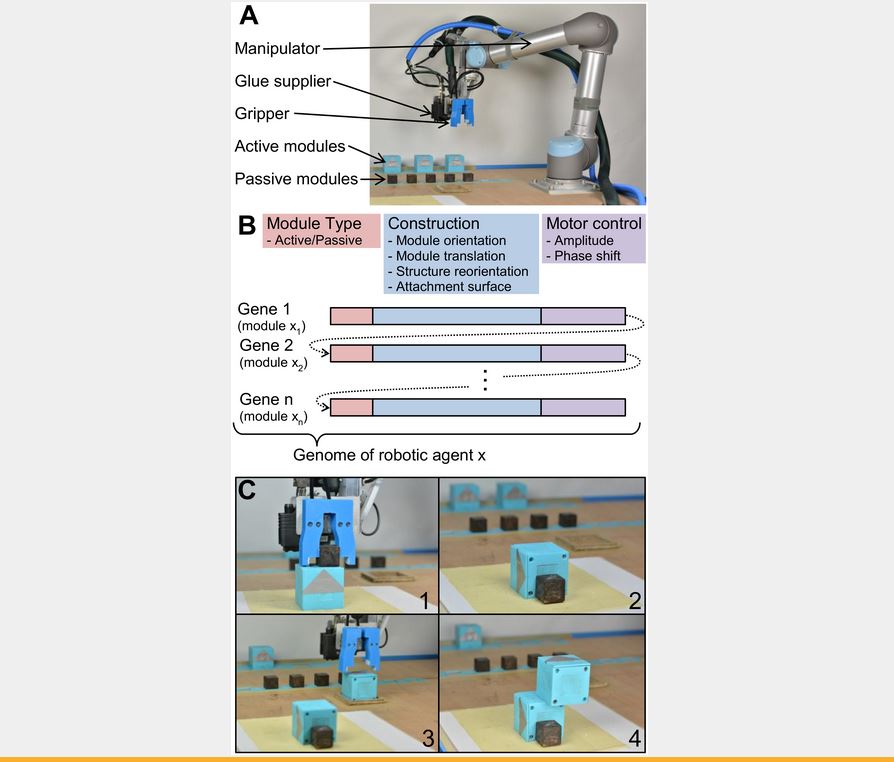
“Each of the constructed candidate agents is assembled from a set of passive and active cubic modules that the mother robot can easily manipulate,” added Brodbeck.
“The mother robot performs a series of handling operations such as pick-and-place or rotation to rearrange the components and physically connect them with hot melt adhesive (HMA).
“Machines are physically constructed and their performance is analyzed without simulation and human intervention to incrementally improve their functionality.
“While this model-free approach avoids the reality gap and the selection of infeasible solutions, at least two problems need to be solved. First, given the limited resources in the real world, particularly time, an efficient improvement of functionality must be achieved in a limited number of evolutionary iterations.
“Second, physical constraints in the automatic construction of variations of machines have to be addressed because conventional automation technologies are typically designed for mass production rather than mass customization, thus the autonomous development of a large morphological diversity still remains to be a considerable challenge.”
The key is to build variations of physical machines
The report concludes extending the model-free phenotype development and optimization could allow machines to autonomously and adaptively modify their mechanical structures together with their control, similar to the animals’ functions observed in ontogenetic developmental processes.
The key for a meaningful design optimization is to build variations of physical machines through the course of the evolutionary process. However, there is only a limited number of mechatronic systems that can physically adapt their morphologies.
“For the successful artificial evolution of physical systems, generating a diverse set of solutions is essential to efficiently explore the design space. This can be challenging, because an open-ended construction process is required, which enables for the fabrication of candidate agents with large morphological variation,” said Brodbeck.
“The demonstrations show the feasibility of the model-free evolution of a physical system. The evaluation of a candidate’s fitness is done with a physical robot, producing real data in a time-intensive process.”
Source: PLOS (Public Library of Science)
Title: Morphological Evolution of Physical Robots through Model-Free Phenotype Development
Author(s): Luzius Brodbeck, Simon Hauser, Fumiya Iida
Published: June 19, 2015
DOI: 10.1371/journal.pone.0128444







